- Tutorial
Всем доброго дня. В данной статье хочу показать один из графических методов построения математических моделей для динамических систем, который называется Bond graph («bond» - связи, «graph» - граф). В русской литературе, описания данного метода, я нашел только в Учебном пособии Томского политехнического университета, А.В. Воронин «МОДЕЛИРОВАНИЕ МЕХАТРОННЫХ СИСТЕМ» 2008 г. Также показать классический метод через уравнение Лагранжа 2 рода.
Метод Лагранжа
Я не буду расписывать теорию, покажу этапы расчётов и с небольшими комментариями. Лично мне легче учиться на примерах, чем 10 раз читать теорию. Как мне показалось, в русской литературе, объяснение данного метода, да и вообще математики или физики, очень насыщено сложными формулами, что соответственно требует серьезного математического бэкграунда. Во время изучения метода Лагранжа (учусь в Туринском политехническом университет, Италия), я изучал русскую литературу, чтобы сопоставить методики расчётов, и мне было тяжело следить за ходом решения данного метода. Даже вспоминая курсы по моделированию в «Харьковском авиационном институте», вывод подобных методов был очень громоздким, и никто не затруднял себя в попытке разобраться в этом вопросе. Вот этому я решил написать, методичку для построения мат моделей по Лагранжу, как так оказалось это совсем не сложно, достаточно знать как считать производные по времени и частные производные. Для моделей по сложнее еще добавляются матрицы поворота, но в них тоже нет ничего сложного.Особенности методов моделирования:
- Ньютона-Эйлера : векторные уравнения, основанные на динамическом равновесии сил (force) и моментов (moments)
- Лагранжа : скалярные уравнения, основанные на функциях состояния связанных с кинетической и потенциальной энергией (energies)
- Бонд-граф : метод основанный на течении мощности (power) между элементами системы
Начнем с простого примера. Масса с пружиной и демпфером. Пренебрегаем силой тяжести.

Рис 1 . Масса с пружиной и демпфером
Первым делом обозначаем:
- начальную системы координат (НСК) или неподвижную ск R0(i0,j0,k0) . Где? Можно тыкнуть пальцем в небо, но подёргав кончиками нейронов в мозгу, проходит идея поставить НСК на линии движения тела М1.
- системы координат для каждого тела с массой (у нас М1 R1(i1,j1,k1) ), ориентация может быть произвольной, но зачем усложнять себе жизнь, ставим с минимальным отличием от НСК
- обобщеные координаты q_i (минимальное количество переменные которыми можно описать движение), в данном примере одна обобщенная координата, движение только вдоль оси j

Рис 2 . Проставляем системы координат и обобщенные координаты

Рис 3 . Позиция и скорость тела М1
После найдем кинетическую (С) и потенциальную (Р) энергии и диссипативную функцию (D) для демпфера по формулам:

Рис 4 . Полная формула кинетической энергии
В нашем примере вращения нет, вторая составляющая равна 0.

![]()
Рис 5 . Расчет кинетической, потенциальной энергии и диссипативной функции
Уравнение Лагранжа имеет следующий вид:

Рис 6 . Уравнение Лагранжа и Лагранжиан
Дельта W_i
это виртуальная работа совершенная приложенными силами и моментами. Найдем ее:

Рис 7 . Расчет виртуальной работы
Где дельта q_1 виртуальное перемещение.
Подставляем всё в уравнение Лагранжа:

Рис 8 . Полученная модель массы с пружинной и демпфером
На этом метод Лагранжа закончился. Как видно не так сложно, но это все же очень простой пример, для которого скорее всего метод Ньютона-Эйлера даже был бы проще. Для более сложных систем, где будет несколько тела, повернутые друг относительно друга на разные угол, метод Лагранжа будет легче.
Метод Bond graph
Сразу покажу так выглядит модель в bond-graph для примера с массой пружиной и демпфером:
Рис 9 . Bond-graph массы с пружинной и демпфером
Здесь придётся рассказать немного теории, которой хватит для построения простых моделей. Если кто нибудь заинтересован можете почитать книгу ( Bond Graph Methodology ) или (Воронин А.В. Моделирование мехатронных систем: учебное пособие. – Томск: Изд-во Томского политехнического университета, 2008 ).
Определим для начала, что сложные системы состоят из нескольких доменов. Например электродвигатель состоит из электрической и механической частей или доменов.
Bond graph основан на обмене мощности между этими доменами, подсистемами. Заметим, что обмен мощностью, любой формы, всегда определяется двумя переменными (переменные мощности ) с помощью которых, мы можем изучать взаимодействие различных подсистем в составе динамической системы (см. таблицу).

Как видно из таблицы выражение мощности везде практически одинаковое. В обобщении, Мощность - это произведение «потока - f » на «усилия - e ».
Усилие (англ. effort ) в электрическом домене это напряжение (e), в механическом - сила (F) или момент (T), в гидравлике – давление (p).
Поток (англ. flow ) в электрическом домене это ток (i), в механическом - скорость (v) или угловая скорость (omega), в гидравлике – поток или расход жидкости (Q).
Принимая данные обозначения, получаем выражение для мощности:
Рис 10 . Формула мощности через мощностные переменные
В языке bond-graph соединение между двумя подсистемами которые обмениваются мощностью представлена связью (англ. bond
). По этому и называется данный метод bond-graph
или граф-связей, связной граф
. Рассмотрим блок-диаграмму
связей в модели с электродвигателем (это еще не bond-graph):

Рис 11 . Блок-диарамма потока мощности между доменами
Если у нас источник напряжения, то соответственно он генерирует напряжение и отдает его двигателю на отмотки (по этому стрелка направлена в сторону двигателя), в зависимости от сопротивления обмотки появляется ток по закону Ома (направлен от двигателя к источнику). Соответственно одна переменная является входом в подсистему, а вторая необходима должна быть выходом из подсистемы. Здесь напряжение (effort ) – вход, ток (flow ) – выход.
Если использовать источник тока, как поменяется диаграмма? Правильно. Ток будет направлен к двигателю, а напряжение к источнику. Тогда ток (flow ) – вход, напряжение (effort ) – выход.
Рассмотрим пример в механике. Сила, действующая на массу.

Рис 12 . Сила приложенная к массе
Блок-Диаграмма будет следующей:

Рис 13 . Блок-диаграмма
В этом примере, Сила (effort
) – входная переменная для массы. (Сила приложена к массе)
По второму закону Ньютона:
Масса отвечает скоростью:
![]()
В этом примере если одна переменная (сила - effort ) является входом в механический домен, то другая мощностная переменная (скорость - flow ) – автоматически становится выходом .
Что бы различать, где вход, а где выход, используется вертикальная линия на конце стрелки (связи) между элементами, эту линию называют знак причинности
или причинная связь
(causality
). Получается: приложенная сила – причина, а скорость - следствие. Этот знак очень важен для правильного построения модели системы, так как причинность - это следствие физического поведения и обмена мощностями двух подсистем, по этому выбор расположения знака причинности не может быть произвольным.

Рис 14 . Обозначение причинной связи
Эта вертикальная линия показывает какая подсистема получает усилие (effort
) и как следствие производить поток (flow
). В примере с массой будет так:

Рис 14 . Причинна связь для силы действующей на массу
По стрелке понятно что на вход для массы - сила , а выход - скорость . Это делается, что бы не загромождать стрелками схему и систематизации построения модели.
Следующий важный момент. Обобщённый импульс (количество движения) и перемещение (энергетические переменные ).
Таблица мощностных и энергетический переменных в разных доменах

Таблица выше вводит две дополнительные физические величины, используемые в методе bond-graph. Они называются обобщенный импульс (р ) и обобщенное перемещение (q ) или энергетические переменные, и получить их можно интегрированием мощностных переменных по времени:

Рис 15 . Связь между мощностными и энергетическими переменными
В электрическом домене :
Исходя из закона Фарадея, напряжение
на концах проводника равняется производной от магнитного потока через этот проводник.

А Сила тока - физическая величина, равная отношению количества заряда Q, прошедшего за некоторое время t через поперечное сечение проводника, к величине этого промежутка времени.
Механический домен:
Из 2 закона Ньютона, Сила
– производная по времени от импульса

И соответственно, скорость - производная по времени от перемещения:
Обобщим :

Базовые элементы
Все элементы в динамических системах, можно разделить на двухполюсные и четырехполюсные компоненты.Рассмотрим двухполюсные компоненты :
Источники
Источники бывают как усилия, так и потока. Аналогия в электрическом домене: источник усилия
– источник напряжения
, источник потока
– источник тока
. Причинные знаки для источников должны быть только такие.

Рис 16 . Причинные связи и обозначение источников
Компонент R
– диссипативный элемент
Компонент I
– инерциальный элемент
Компонент C
– емкостной элемент
Как видно из рисунков, разные элементы одного типа R,C,I описываться одинаковыми уравнениями. ТОЛЬКО есть отличие для электрической емкости, это нужно просто запомнить!
Четырёхполюснике компоненты :
Рассмотрим два компонента трансформатор и гиратор.

Последними важными компонентами в методе bond-graph выступают соединения. Существует два типа узлов:


На этом с компонентами закончили.
Основные этапы для проставления причинных связей после построения bond-graph:
- Проставить причинные связи всем источникам
- Пройтись по всем узлам и проставить причинные связи после пункта 1
- Для компонентов I присвоить входную причинную связь (усилие входит в этот компонент), для компонентов С присваиваем выходную причинную связь (усилие выходит из этого компонента)
- Повторить пункт 2
- Проставить причинные связи для компонентов R
Давайте решим пару примеров. Начнем с электрической цепь, лучше понять аналогию построения bond-graph.
Пример 1

Начнем построение bond-graph с источника напряжения. Просто пишем Se и ставим стрелку.

Видите все просто! Смотрим далее, R и L соединены последовательно, значить в них течет одинаковый ток, если говорить в мощностных переменных – одинаковый поток. Какой узел имеет одинаковый поток? Правильный ответ 1-узел. Присоединяем к 1-узлу источник, сопротивление (компонент - R) и индуктивность (компонент - I).

Далее у нас емкость и сопротивление в параллели, значить они имеют одинаковое напряжение или усилие. 0-узел подойдет как никто другой. Соединяем емкость (компонент С) и сопротивление (компонент R) к 0-узлу.

Узлы 1 и 0 тоже соединяем между собой. Направление стрелок выбирается произвольное, направление связи влияет только на знак в уравнениях.
Получиться следующий граф связей:

Теперь нужно проставить причинные связи. Следуя указаниям по последовательности их проставления, начнем с источника.
- Мы имеем источник напряжения (усилия), такой источник имеет только один вариант причинности – выходную. Ставим.
- Далее есть компонент I, смотрим что рекомендуют. Ставим
- Проставляем для 1-узла. Есть
- 0-узел должен иметь один вход и все выходные причинные связи. У нас есть пока одна выходная. Ищем компоненты С или I. Нашли. Ставим
- Проставляем что осталось

Вот и все. Bond-graph построен. Ура, Товарищи!
Осталось дело за малым, написать уравнения, описывающие нашу систему. Для этого составим таблицу с 3 столбцами. В первом будут все компоненты системы, во втором входная переменная для каждого элемента, а в третьем – выходная переменная, для такого же компонента. Вход и выход мы уже определили причинностнными связями. Так что проблем возникнуть не должно.
Пронумеруем каждую связь для удобства записи уровнений. Уравнения для каждого элемента берем из перечня компонентов C,R,I.


Составив таблицу определим переменные состояния, их в данном примере 2, p3 и q5. Далее нужно записать уравнения состояния:

Вот и все модель готова.
Пример 2. Сразу хочу извениться за качество фото, главное что можно прочитать
Решим еще один пример для механической системы, тот же что мы решали методом Лагранжа. Я показу решение без комментариев. Проверим какой из данных методов проще, легче.

В матбале были составлены обе мат модели с одинаковыми параметрами, полученые методом Лагранжа и bond-graph. Результат ниже: Добавить метки
Для начала рассмотрим случай функции двух переменных. Условным экстремумом функции $z=f(x,y)$ в точке $M_0(x_0;y_0)$ называется экстремум этой функции, достигнутый при условии, что переменные $x$ и $y$ в окрестности данной точки удовлетворяют уравнению связи $\varphi (x,y)=0$.
Название «условный» экстремум связано с тем, что на переменные наложено дополнительное условие $\varphi(x,y)=0$. Если из уравнения связи можно выразить одну переменную через другую, то задача определения условного экстремума сводится к задаче на обычный экстремум функции одной переменной. Например, если из уравнения связи следует $y=\psi(x)$, то подставив $y=\psi(x)$ в $z=f(x,y)$, получим функцию одной переменной $z=f\left(x,\psi(x)\right)$. В общем случае, однако, такой метод малопригоден, поэтому требуется введение нового алгоритма.
Метод множителей Лагранжа для функций двух переменных.
Метод множителей Лагранжа состоит в том, что для отыскания условного экстремума составляют функцию Лагранжа: $F(x,y)=f(x,y)+\lambda\varphi(x,y)$ (параметр $\lambda$ называют множителем Лагранжа). Необходимые условия экстремума задаются системой уравнений, из которой определяются стационарные точки:
$$ \left \{ \begin{aligned} & \frac{\partial F}{\partial x}=0;\\ & \frac{\partial F}{\partial y}=0;\\ & \varphi (x,y)=0. \end{aligned} \right. $$
Достаточным условием, из которого можно выяснить характер экстремума, служит знак $d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2$. Если в стационарной точке $d^2F > 0$, то функция $z=f(x,y)$ имеет в данной точке условный минимум, если же $d^2F < 0$, то условный максимум.
Есть и другой способ для определения характера экстремума. Из уравнения связи получаем: $\varphi_{x}^{"}dx+\varphi_{y}^{"}dy=0$, $dy=-\frac{\varphi_{x}^{"}}{\varphi_{y}^{"}}dx$, поэтому в любой стационарной точке имеем:
$$d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2=F_{xx}^{""}dx^2+2F_{xy}^{""}dx\left(-\frac{\varphi_{x}^{"}}{\varphi_{y}^{"}}dx\right)+F_{yy}^{""}\left(-\frac{\varphi_{x}^{"}}{\varphi_{y}^{"}}dx\right)^2=\\ =-\frac{dx^2}{\left(\varphi_{y}^{"} \right)^2}\cdot\left(-(\varphi_{y}^{"})^2 F_{xx}^{""}+2\varphi_{x}^{"}\varphi_{y}^{"}F_{xy}^{""}-(\varphi_{x}^{"})^2 F_{yy}^{""} \right)$$
Второй сомножитель (расположенный в скобке) можно представить в такой форме:
Красным цветом выделены элементы определителя $\left| \begin{array} {cc} F_{xx}^{""} & F_{xy}^{""} \\ F_{xy}^{""} & F_{yy}^{""} \end{array} \right|$, который является гессианом функции Лагранжа. Если $H > 0$, то $d^2F < 0$, что указывает на условный максимум. Аналогично, при $H < 0$ имеем $d^2F > 0$, т.е. имеем условный минимум функции $z=f(x,y)$.
Примечание относительно формы записи определителя $H$. показать\скрыть
$$ H=-\left|\begin{array} {ccc} 0 & \varphi_{x}^{"} & \varphi_{y}^{"}\\ \varphi_{x}^{"} & F_{xx}^{""} & F_{xy}^{""} \\ \varphi_{y}^{"} & F_{xy}^{""} & F_{yy}^{""} \end{array} \right| $$
В этой ситуации сформулированное выше правило изменится следующим образом: если $H > 0$, то функция имеет условный минимум, а при $H < 0$ получим условный максимум функции $z=f(x,y)$. При решении задач следует учитывать такие нюансы.
Алгоритм исследования функции двух переменных на условный экстремум
- Составить функцию Лагранжа $F(x,y)=f(x,y)+\lambda\varphi(x,y)$
- Решить систему $ \left \{ \begin{aligned} & \frac{\partial F}{\partial x}=0;\\ & \frac{\partial F}{\partial y}=0;\\ & \varphi (x,y)=0. \end{aligned} \right.$
- Определить характер экстремума в каждой из найденных в предыдущем пункте стационарных точек. Для этого применить любой из указанных способов:
- Составить определитель $H$ и выяснить его знак
- С учетом уравнения связи вычислить знак $d^2F$
Метод множителей Лагранжа для функций n переменных
Допустим, мы имеем функцию $n$ переменных $z=f(x_1,x_2,\ldots,x_n)$ и $m$ уравнений связи ($n > m$):
$$\varphi_1(x_1,x_2,\ldots,x_n)=0; \; \varphi_2(x_1,x_2,\ldots,x_n)=0,\ldots,\varphi_m(x_1,x_2,\ldots,x_n)=0.$$
Обозначив множители Лагранжа как $\lambda_1,\lambda_2,\ldots,\lambda_m$, составим функцию Лагранжа:
$$F(x_1,x_2,\ldots,x_n,\lambda_1,\lambda_2,\ldots,\lambda_m)=f+\lambda_1\varphi_1+\lambda_2\varphi_2+\ldots+\lambda_m\varphi_m$$
Необходимые условия наличия условного экстремума задаются системой уравнений, из которой находятся координаты стационарных точек и значения множителей Лагранжа:
$$\left\{\begin{aligned} & \frac{\partial F}{\partial x_i}=0; (i=\overline{1,n})\\ & \varphi_j=0; (j=\overline{1,m}) \end{aligned} \right.$$
Выяснить, условный минимум или условный максимум имеет функция в найденной точке, можно, как и ранее, посредством знака $d^2F$. Если в найденной точке $d^2F > 0$, то функция имеет условный минимум, если же $d^2F < 0$, - то условный максимум. Можно пойти иным путем, рассмотрев следующую матрицу:

Определитель матрицы $\left| \begin{array} {ccccc} \frac{\partial^2F}{\partial x_{1}^{2}} & \frac{\partial^2F}{\partial x_{1}\partial x_{2}} & \frac{\partial^2F}{\partial x_{1}\partial x_{3}} &\ldots & \frac{\partial^2F}{\partial x_{1}\partial x_{n}}\\ \frac{\partial^2F}{\partial x_{2}\partial x_1} & \frac{\partial^2F}{\partial x_{2}^{2}} & \frac{\partial^2F}{\partial x_{2}\partial x_{3}} &\ldots & \frac{\partial^2F}{\partial x_{2}\partial x_{n}}\\ \frac{\partial^2F}{\partial x_{3} \partial x_{1}} & \frac{\partial^2F}{\partial x_{3}\partial x_{2}} & \frac{\partial^2F}{\partial x_{3}^{2}} &\ldots & \frac{\partial^2F}{\partial x_{3}\partial x_{n}}\\ \ldots & \ldots & \ldots &\ldots & \ldots\\ \frac{\partial^2F}{\partial x_{n}\partial x_{1}} & \frac{\partial^2F}{\partial x_{n}\partial x_{2}} & \frac{\partial^2F}{\partial x_{n}\partial x_{3}} &\ldots & \frac{\partial^2F}{\partial x_{n}^{2}}\\ \end{array} \right|$, выделенной в матрице $L$ красным цветом, есть гессиан функции Лагранжа. Используем следующее правило:
- Если знаки угловых миноров $H_{2m+1},\; H_{2m+2},\ldots,H_{m+n}$ матрицы $L$ совпадают с знаком $(-1)^m$, то исследуемая стационарная точка является точкой условного минимума функции $z=f(x_1,x_2,x_3,\ldots,x_n)$.
- Если знаки угловых миноров $H_{2m+1},\; H_{2m+2},\ldots,H_{m+n}$ чередуются, причём знак минора $H_{2m+1}$ совпадает с знаком числа $(-1)^{m+1}$, то исследуемая стационарная точка является точкой условного максимума функции $z=f(x_1,x_2,x_3,\ldots,x_n)$.
Пример №1
Найти условный экстремум функции $z(x,y)=x+3y$ при условии $x^2+y^2=10$.
Геометрическая интерпретация данной задачи такова: требуется найти наибольшее и наименьшее значение аппликаты плоскости $z=x+3y$ для точек ее пересечения с цилиндром $x^2+y^2=10$.
Выразить одну переменную через другую из уравнения связи и подставить ее в функцию $z(x,y)=x+3y$ несколько затруднительно, поэтому будем использовать метод Лагранжа.
Обозначив $\varphi(x,y)=x^2+y^2-10$, составим функцию Лагранжа:
$$ F(x,y)=z(x,y)+\lambda \varphi(x,y)=x+3y+\lambda(x^2+y^2-10);\\ \frac{\partial F}{\partial x}=1+2\lambda x; \frac{\partial F}{\partial y}=3+2\lambda y. $$
Запишем систему уравнений для определения стационарных точек функции Лагранжа:
$$ \left \{ \begin{aligned} & 1+2\lambda x=0;\\ & 3+2\lambda y=0;\\ & x^2+y^2-10=0. \end{aligned} \right. $$
Если предположить $\lambda=0$, то первое уравнение станет таким: $1=0$. Полученное противоречие говорит о том, что $\lambda\neq 0$. При условии $\lambda\neq 0$ из первого и второго уравнений имеем: $x=-\frac{1}{2\lambda}$, $y=-\frac{3}{2\lambda}$. Подставляя полученные значения в третье уравнение, получим:
$$ \left(-\frac{1}{2\lambda} \right)^2+\left(-\frac{3}{2\lambda} \right)^2-10=0;\\ \frac{1}{4\lambda^2}+\frac{9}{4\lambda^2}=10; \lambda^2=\frac{1}{4}; \left[ \begin{aligned} & \lambda_1=-\frac{1}{2};\\ & \lambda_2=\frac{1}{2}. \end{aligned} \right.\\ \begin{aligned} & \lambda_1=-\frac{1}{2}; \; x_1=-\frac{1}{2\lambda_1}=1; \; y_1=-\frac{3}{2\lambda_1}=3;\\ & \lambda_2=\frac{1}{2}; \; x_2=-\frac{1}{2\lambda_2}=-1; \; y_2=-\frac{3}{2\lambda_2}=-3.\end{aligned} $$
Итак, система имеет два решения: $x_1=1;\; y_1=3;\; \lambda_1=-\frac{1}{2}$ и $x_2=-1;\; y_2=-3;\; \lambda_2=\frac{1}{2}$. Выясним характер экстремума в каждой стационарной точке: $M_1(1;3)$ и $M_2(-1;-3)$. Для этого вычислим определитель $H$ в каждой из точек.
$$ \varphi_{x}^{"}=2x;\; \varphi_{y}^{"}=2y;\; F_{xx}^{""}=2\lambda;\; F_{xy}^{""}=0;\; F_{yy}^{""}=2\lambda.\\ H=\left| \begin{array} {ccc} 0 & \varphi_{x}^{"} & \varphi_{y}^{"}\\ \varphi_{x}^{"} & F_{xx}^{""} & F_{xy}^{""} \\ \varphi_{y}^{"} & F_{xy}^{""} & F_{yy}^{""} \end{array} \right|= \left| \begin{array} {ccc} 0 & 2x & 2y\\ 2x & 2\lambda & 0 \\ 2y & 0 & 2\lambda \end{array} \right|= 8\cdot\left| \begin{array} {ccc} 0 & x & y\\ x & \lambda & 0 \\ y & 0 & \lambda \end{array} \right| $$
В точке $M_1(1;3)$ получим: $H=8\cdot\left| \begin{array} {ccc} 0 & x & y\\ x & \lambda & 0 \\ y & 0 & \lambda \end{array} \right|= 8\cdot\left| \begin{array} {ccc} 0 & 1 & 3\\ 1 & -1/2 & 0 \\ 3 & 0 & -1/2 \end{array} \right|=40 > 0$, поэтому в точке $M_1(1;3)$ функция $z(x,y)=x+3y$ имеет условный максимум, $z_{\max}=z(1;3)=10$.
Аналогично, в точке $M_2(-1;-3)$ найдем: $H=8\cdot\left| \begin{array} {ccc} 0 & x & y\\ x & \lambda & 0 \\ y & 0 & \lambda \end{array} \right|= 8\cdot\left| \begin{array} {ccc} 0 & -1 & -3\\ -1 & 1/2 & 0 \\ -3 & 0 & 1/2 \end{array} \right|=-40$. Так как $H < 0$, то в точке $M_2(-1;-3)$ имеем условный минимум функции $z(x,y)=x+3y$, а именно: $z_{\min}=z(-1;-3)=-10$.
Отмечу, что вместо вычисления значения определителя $H$ в каждой точке, гораздо удобнее раскрыть его в общем виде. Дабы не загромождать текст подробностями, этот способ скрою под примечание.
Запись определителя $H$ в общем виде. показать\скрыть
$$ H=8\cdot\left|\begin{array}{ccc}0&x&y\\x&\lambda&0\\y&0&\lambda\end{array}\right| =8\cdot\left(-\lambda{y^2}-\lambda{x^2}\right) =-8\lambda\cdot\left(y^2+x^2\right). $$
В принципе, уже очевидно, какой знак имеет $H$. Так как ни одна из точек $M_1$ или $M_2$ не совпадает с началом координат, то $y^2+x^2>0$. Следовательно, знак $H$ противоположен знаку $\lambda$. Можно и довести вычисления до конца:
$$ \begin{aligned} &H(M_1)=-8\cdot\left(-\frac{1}{2}\right)\cdot\left(3^2+1^2\right)=40;\\ &H(M_2)=-8\cdot\frac{1}{2}\cdot\left((-3)^2+(-1)^2\right)=-40. \end{aligned} $$
Вопрос о характере экстремума в стационарных точках $M_1(1;3)$ и $M_2(-1;-3)$ можно решить и без использования определителя $H$. Найдем знак $d^2F$ в каждой стационарной точке:
$$ d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2=2\lambda \left(dx^2+dy^2\right) $$
Отмечу, что запись $dx^2$ означает именно $dx$, возведённый в вторую степень, т.е. $\left(dx \right)^2$. Отсюда имеем: $dx^2+dy^2>0$, посему при $\lambda_1=-\frac{1}{2}$ получим $d^2F < 0$. Следовательно, функция имеет в точке $M_1(1;3)$ условный максимум. Аналогично, в точке $M_2(-1;-3)$ получим условный минимум функции $z(x,y)=x+3y$. Отметим, что для определения знака $d^2F$ не пришлось учитывать связь между $dx$ и $dy$, ибо знак $d^2F$ очевиден без дополнительных преобразований. В следующем примере для определения знака $d^2F$ уже будет необходимо учесть связь между $dx$ и $dy$.
Ответ : в точке $(-1;-3)$ функция имеет условный минимум, $z_{\min}=-10$. В точке $(1;3)$ функция имеет условный максимум, $z_{\max}=10$
Пример №2
Найти условный экстремум функции $z(x,y)=3y^3+4x^2-xy$ при условии $x+y=0$.
Первый способ (метод множителей Лагранжа)
Обозначив $\varphi(x,y)=x+y$ составим функцию Лагранжа: $F(x,y)=z(x,y)+\lambda \varphi(x,y)=3y^3+4x^2-xy+\lambda(x+y)$.
$$ \frac{\partial F}{\partial x}=8x-y+\lambda; \; \frac{\partial F}{\partial y}=9y^2-x+\lambda.\\ \left \{ \begin{aligned} & 8x-y+\lambda=0;\\ & 9y^2-x+\lambda=0; \\ & x+y=0. \end{aligned} \right. $$
Решив систему, получим: $x_1=0$, $y_1=0$, $\lambda_1=0$ и $x_2=\frac{10}{9}$, $y_2=-\frac{10}{9}$, $\lambda_2=-10$. Имеем две стационарные точки: $M_1(0;0)$ и $M_2 \left(\frac{10}{9};-\frac{10}{9} \right)$. Выясним характер экстремума в каждой стационарной точке с использованием определителя $H$.
$$ H=\left| \begin{array} {ccc} 0 & \varphi_{x}^{"} & \varphi_{y}^{"}\\ \varphi_{x}^{"} & F_{xx}^{""} & F_{xy}^{""} \\ \varphi_{y}^{"} & F_{xy}^{""} & F_{yy}^{""} \end{array} \right|= \left| \begin{array} {ccc} 0 & 1 & 1\\ 1 & 8 & -1 \\ 1 & -1 & 18y \end{array} \right|=-10-18y $$
В точке $M_1(0;0)$ $H=-10-18\cdot 0=-10 < 0$, поэтому $M_1(0;0)$ есть точка условного минимума функции $z(x,y)=3y^3+4x^2-xy$, $z_{\min}=0$. В точке $M_2\left(\frac{10}{9};-\frac{10}{9}\right)$ $H=10 > 0$, посему в данной точке функция имеет условный максимум, $z_{\max}=\frac{500}{243}$.
Исследуем характер экстремума в каждой из точек иным методом, основываясь на знаке $d^2F$:
$$ d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2=8dx^2-2dxdy+18ydy^2 $$
Из уравнения связи $x+y=0$ имеем: $d(x+y)=0$, $dx+dy=0$, $dy=-dx$.
$$ d^2 F=8dx^2-2dxdy+18ydy^2=8dx^2-2dx(-dx)+18y(-dx)^2=(10+18y)dx^2 $$
Так как $ d^2F \Bigr|_{M_1}=10 dx^2 > 0$, то $M_1(0;0)$ является точкой условного минимума функции $z(x,y)=3y^3+4x^2-xy$. Аналогично, $d^2F \Bigr|_{M_2}=-10 dx^2 < 0$, т.е. $M_2\left(\frac{10}{9}; -\frac{10}{9} \right)$ - точка условного максимума.
Второй способ
Из уравнения связи $x+y=0$ получим: $y=-x$. Подставив $y=-x$ в функцию $z(x,y)=3y^3+4x^2-xy$, получим некоторую функцию переменной $x$. Обозначим эту функцию как $u(x)$:
$$ u(x)=z(x,-x)=3\cdot(-x)^3+4x^2-x\cdot(-x)=-3x^3+5x^2. $$
Таким образом задачу о нахождении условного экстремума функции двух переменных мы свели к задаче определения экстремума функции одной переменной.
$$ u_{x}^{"}=-9x^2+10x;\\ -9x^2+10x=0; \; x\cdot(-9x+10)=0;\\ x_1=0; \; y_1=-x_1=0;\\ x_2=\frac{10}{9}; \; y_2=-x_2=-\frac{10}{9}. $$
Получили точки $M_1(0;0)$ и $M_2\left(\frac{10}{9}; -\frac{10}{9}\right)$. Дальнейшее исследование известно из курса дифференциального исчисления функций одной переменой. Исследуя знак $u_{xx}^{""}$ в каждой стационарной точке или проверяя смену знака $u_{x}^{"}$ в найденных точках, получим те же выводы, что и при решении первым способом. Например, проверим знак $u_{xx}^{""}$:
$$u_{xx}^{""}=-18x+10;\\ u_{xx}^{""}(M_1)=10;\;u_{xx}^{""}(M_2)=-10.$$
Так как $u_{xx}^{""}(M_1)>0$, то $M_1$ - точка минимума функции $u(x)$, при этом $u_{\min}=u(0)=0$. Так как $u_{xx}^{""}(M_2)<0$, то $M_2$ - точка максимума функции $u(x)$, причём $u_{\max}=u\left(\frac{10}{9}\right)=\frac{500}{243}$.
Значения функции $u(x)$ при заданном условии связи совпадают с значениями функции $z(x,y)$, т.е. найденные экстремумы функции $u(x)$ и есть искомые условные экстремумы функции $z(x,y)$.
Ответ : в точке $(0;0)$ функция имеет условный минимум, $z_{\min}=0$. В точке $\left(\frac{10}{9}; -\frac{10}{9} \right)$ функция имеет условный максимум, $z_{\max}=\frac{500}{243}$.
Рассмотрим еще один пример, в котором характер экстремума выясним посредством определения знака $d^2F$.
Пример №3
Найти наибольшее и наименьшее значения функции $z=5xy-4$, если переменные $x$ и $y$ положительны и удовлетворяют уравнению связи $\frac{x^2}{8}+\frac{y^2}{2}-1=0$.
Составим функцию Лагранжа: $F=5xy-4+\lambda \left(\frac{x^2}{8}+\frac{y^2}{2}-1 \right)$. Найдем стационарные точки функции Лагранжа:
$$ F_{x}^{"}=5y+\frac{\lambda x}{4}; \; F_{y}^{"}=5x+\lambda y.\\ \left \{ \begin{aligned} & 5y+\frac{\lambda x}{4}=0;\\ & 5x+\lambda y=0;\\ & \frac{x^2}{8}+\frac{y^2}{2}-1=0;\\ & x > 0; \; y > 0. \end{aligned} \right. $$
Все дальнейшие преобразования осуществляются с учетом $x > 0; \; y > 0$ (это оговорено в условии задачи). Из второго уравнения выразим $\lambda=-\frac{5x}{y}$ и подставим найденное значение в первое уравнение: $5y-\frac{5x}{y}\cdot \frac{x}{4}=0$, $4y^2-x^2=0$, $x=2y$. Подставляя $x=2y$ в третье уравнение, получим: $\frac{4y^2}{8}+\frac{y^2}{2}-1=0$, $y^2=1$, $y=1$.
Так как $y=1$, то $x=2$, $\lambda=-10$. Характер экстремума в точке $(2;1)$ определим, исходя из знака $d^2F$.
$$ F_{xx}^{""}=\frac{\lambda}{4}; \; F_{xy}^{""}=5; \; F_{yy}^{""}=\lambda. $$
Так как $\frac{x^2}{8}+\frac{y^2}{2}-1=0$, то:
$$ d\left(\frac{x^2}{8}+\frac{y^2}{2}-1\right)=0; \; d\left(\frac{x^2}{8} \right)+d\left(\frac{y^2}{2} \right)=0; \; \frac{x}{4}dx+ydy=0; \; dy=-\frac{xdx}{4y}. $$
В принципе, здесь можно сразу подставить координаты стационарной точки $x=2$, $y=1$ и параметра $\lambda=-10$, получив при этом:
$$ F_{xx}^{""}=\frac{-5}{2}; \; F_{xy}^{""}=-10; \; dy=-\frac{dx}{2}.\\ d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2=-\frac{5}{2}dx^2+10dx\cdot \left(-\frac{dx}{2} \right)-10\cdot \left(-\frac{dx}{2} \right)^2=\\ =-\frac{5}{2}dx^2-5dx^2-\frac{5}{2}dx^2=-10dx^2. $$
Однако в других задачах на условный экстремум стационарных точек может быть несколько. В таких случаях лучше $d^2F$ представить в общем виде, а потом подставлять в полученное выражение координаты каждой из найденных стационарных точек:
$$ d^2 F=F_{xx}^{""}dx^2+2F_{xy}^{""}dxdy+F_{yy}^{""}dy^2=\frac{\lambda}{4}dx^2+10\cdot dx\cdot \frac{-xdx}{4y} +\lambda\cdot \left(-\frac{xdx}{4y} \right)^2=\\ =\frac{\lambda}{4}dx^2-\frac{5x}{2y}dx^2+\lambda \cdot \frac{x^2dx^2}{16y^2}=\left(\frac{\lambda}{4}-\frac{5x}{2y}+\frac{\lambda \cdot x^2}{16y^2} \right)\cdot dx^2 $$
Подставляя $x=2$, $y=1$, $\lambda=-10$, получим:
$$ d^2 F=\left(\frac{-10}{4}-\frac{10}{2}-\frac{10 \cdot 4}{16} \right)\cdot dx^2=-10dx^2. $$
Так как $d^2F=-10\cdot dx^2 < 0$, то точка $(2;1)$ есть точкой условного максимума функции $z=5xy-4$, причём $z_{\max}=10-4=6$.
Ответ : в точке $(2;1)$ функция имеет условный максимум, $z_{\max}=6$.
В следующей части рассмотрим применение метода Лагранжа для функций большего количества переменных.
ЛАГРАНЖА МЕТОД
Метод приведения квадратичной формы к сумме квадратов, указанный в 1759 Ж. Лагранжем (J. Lagrange). Пусть дана
от ппеременных х 0 , x
1 ,..., х п
.
с коэффициентами из поля k
характеристики Требуется привести эту форму к канонич. виду
при помощи невырожденного линейного преобразования переменных. Л. м. состоит в следующем. Можно считать, что не все коэффициенты формы (1) равны нулю.
Поэтому возможны два случая.
1) При некотором g,
диагональный Тогда
где форма f 1 (х).не содержит переменную x g .
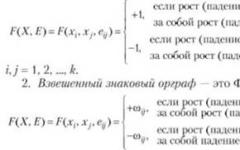
2) Если же все ![]() но
то
но
то

где форма f 2 (х).не содержит двух переменных x g
и x h .
Формы, стоящие под знаками квадратов в (4), линейно независимы. Применением преобразований вида (3) и (4) форма (1) после конечного числа шагов приводится к сумме квадратов линейно независимых линейных форм. С помощью частных производных формулы (3) и (4) можно записать в виде

Лит.
: Г а н т м а х е р Ф. Р.,
Теория матриц, 2 изд., М., 1966; К у р о ш А. Г., Курс высшей алгебры, 11 изд., М., 1975; Александров П. С., Лекции по аналитической геометрии..., М., 1968. И. В. Проскуряков.
Математическая энциклопедия. - М.: Советская энциклопедия . И. М. Виноградов . 1977-1985 .
Смотреть что такое "ЛАГРАНЖА МЕТОД" в других словарях:
Лагранжа метод - Лагранжа метод — метод решения ряда классов задач математического программирования с помощью нахождения седловой точки (x*, λ*) функции Лагранжа., что достигается приравниванием нулю частных производных этой функции по… … Экономико-математический словарь
Лагранжа метод - Метод решения ряда классов задач математического программирования с помощью нахождения седловой точки (x*, ?*) функции Лагранжа., что достигается приравниванием нулю частных производных этой функции по xi и?i . См. Лагранжиан. }