Обсудим теперь обратную проблему. Пусть вместо таблицы расстояний нам дана таблица скоростей в различные моменты времени, начиная с нуля. В табл. 8.4 представлена зависимость скорости падающего шара от времени. Аналогичную таблицу можно составить и для машины, если записывать показания спидометра через каждую минуту или полминуты. Но можно ли, зная скорость машины в любой момент времени, вычислить расстояние, которое ею было пройдено? Эта задача обратна той, которую мы только что рассмотрели. Как же решить ее, если скорость машины непостоянна, если она то ускоряется до , то замедляется, затем где-то останавливается у светофора и т.д.? Сделать это нетрудно. Нужно использовать ту же идею и выражать полное расстояние через бесконечно малые его части. Пусть в первую секунду скорость будет , тогда по формуле можно вычислить расстояние, пройденное за эту секунду. В следующую секунду скорость будет несколько другой, хотя, может быть, и близкой к первоначальной, а расстояние, пройденное машиной за вторую секунду, будет равно новой скорости, умноженной на интервал времени (1 сек). Этот процесс можно продолжить дальше, до самого конца пути. В результате мы получим много маленьких отрезков, которые в сумме дадут весь путь. Таким образом, путь является суммой скоростей, умноженных на отдельные интервалы времени, или , где греческая буква (сигма) означает суммирование. Точнее, это будет сумма скоростей в некоторые моменты времени, скажем умноженные на :
причем каждый последующий момент находится по правилу . Но расстояние, полученное этим методом, не будет точным, поскольку скорость за время все же изменяется. Выход из этого положения заключается в том, чтобы брать все меньшие и меньшие интервалы , т. е. разбивать время движения на все большее число все меньших отрезков. В конце концов мы придем к следующему, теперь уже точному выражению для пройденного пути:
![]() . (8.7)
. (8.7)
Таблица 8.4 Скорость падающего шара
Математики придумали для этого предела, как и для дифференциала, специальный символ. Значок превращается в , напоминая о том, что интервал времени сколь угодно мал, а знак суммирования превращается в - искаженное большое , первая буква латинского слова «Summa». Этот значок назван интегралом. Таким образом, мы пишем
Любая функция, заданная в аналитическом виде, т. е. выражающаяся через комбинацию известных нам функций, дифференцируется очень просто - вся операция выполняется чисто алгебраически, и в результате мы всегда получаем какую-то известную функцию. Однако интеграл не от всякой функции можно записать в аналитическом виде. Разумеется, для каждого частного интеграла всегда сначала пытаются найти такую функцию, которая, будучи продифференцирована, давала бы функцию, стоящую после знака интеграла (она называется подынтегральной). Однако это не всегда удается сделать. В таких случаях интеграл вычисляют просто суммированием, т. е. вычисляют суммы типа (8.6) со все меньшими и меньшими интервалами, пока не получат результате достаточной точностью.
Возникновение понятия интеграла было обусловлено необходимостью нахождения первообразной функции по ее производной, а также определения величины работы, площади сложных фигур, расстояния пройденного пути, при параметрах, очерченных кривыми, описываемыми нелинейными формулами.
а что работа равна произведению силы на расстояние. Если все движение происходит с постоянной скоростью или расстояние преодолевается с приложением одной и той же силы, то все понятно, нужно их просто перемножить. Что такое интеграл от константы? вида y=kx+c.
Но сила на протяжении работы может меняться, причем в какой-то закономерной зависимости. Такая же ситуация возникает и с вычислением пройденного расстояния, если скорость непостоянна.
Итак, понятно, для чего нужен интеграл. Определение его как суммы произведений значений функции на бесконечно малое приращение аргумента вполне описывает главный смысл этого понятия как площадь фигуры, ограниченной сверху линией функции, а по краям - границами определения.
Жан Гастон Дарбу, французский математик, во второй половине XIX века очень наглядно объяснил, что такое интеграл. Он сделал это настолько понятно, что в целом разобраться в этом вопросе не составит труда даже школьнику младших классов средней школы.

Допустим, есть функция любой сложной формы. Ось ординат, на которой откладываются значения аргумента, разбивается на небольшие интервалы, в идеале они бесконечно малы, но так как понятие бесконечности довольно абстрактно, то достаточно представить себе просто небольшие отрезки, величину которых обычно обозначают греческой буквой Δ (дельта).
Функция оказалась «нарезанной» на маленькие кирпичики.
Каждому значению аргумента соответствует точка на оси ординат, на которой откладываются соответствующие значения функции. Но так как границ у выделенного участка две, то и значений функции тоже будет два, большее и меньшее.
Сумма произведений бо́льших значений на приращение Δ называется большой суммой Дарбу, и обозначается как S. Соответственно, меньшие на ограниченном участке значения, умноженные на Δ, все вместе образуют малую сумму Дарбу s. Сам участок напоминает прямоугольную трапецию, так как кривизной линии функции при бесконечно малом ее приращении можно пренебречь. Самый простой способ найти площадь такой геометрической фигуры - это сложить произведения большего и меньшего значения функции на Δ-приращение и поделить на два, то есть определить как среднее арифметическое.
Вот что такое интеграл по Дарбу:
s=Σf(x) Δ - малая сумма;
S= Σf(x+Δ)Δ - большая сумма.
Итак, что такое интеграл? Площадь, ограниченная линией функции и границами определения будет равна:

∫f(x)dx = {(S+s)/2} +c
То есть среднее арифметическое большой и малой сумм Дарбу.с - величина постоянная, обнуляемая при дифференцировании.
Исходя из геометрического выражения этого понятия, становится понятен и физический смысл интеграла. очерченная функцией скорости, и ограниченная временным интервалом по оси абсцисс, будет составлять длину пройденного пути.
L = ∫f(x)dx на промежутке от t1 до t2,
f(x) - функция скорости, то есть формула, по которой она меняется во времени;
L - длина пути;
t1 - время начала пути;
t2 - время окончания пути.
Точно по такому же принципу определяется величина работы, только по абсциссе будет откладываться расстояние, а по ординате - величина силы, прилагаемая в каждой конкретной точке.
Обсудим теперь обратную проблему. Пусть вместо таблицы расстояний нам дана таблица скоростей в различные моменты времени, начиная с нуля.
В табл. 8.4 представлена зависимость скорости падающего шара от времени. Аналогичную таблицу можно составить и для машины, если записывать показания спидометра через каждую минуту или полминуты. Но можно ли, зная скорость машины в любой момент времени, вычислить расстояние, которое ею было пройдено? Эта задача обратна той, которую мы только что рассмотрели. Как же решить ее, если скорость машины непостоянна, если она то ускоряется до 90 км/час, то замедляется, затем где-то останавливается у светофора и т.д.? Сделать это нетрудно. Нужно использовать ту же идею и выражать полное расстояние через бесконечно малые его части. Пусть в первую секунду скорость будет vi, тогда по формуле Δs= v 1 \Δt можно вычислить расстояние, пройденное за эту секунду. В следующую секунду скорость будет несколько другой, хотя, может быть, и близкой к первоначальной, а расстояние, пройденное машиной за вторую секунду, будет равно новой скорости, умноженной на интервал времени (1 сек). Этот процесс можно продолжить дальше, до самого конца пути. В результате мы получим много маленьких отрезков, которые в сумме дадут весь путь. Таким образом, путь является суммой скоростей, умноженных на отдельные интервалы времени, или s — ∑vΔt, где греческая буква ∑ (сигма) означает суммирование. Точнее, это будет сумма скоростей в некоторые моменты времени, скажем t i , умноженные на Δt:
причем каждый последующий момент t i+1 находится по правилу t i+1 =t + Δt. Но расстояние, полученное этим методом, не будет точным, поскольку скорость за время Δt все же изменяется. Выход из этого положения заключается в том, чтобы брать все меньшие и меньшие интервалы Δt, т. е. разбивать время движения на все большее число все меньших отрезков. В конце концов мы придем к следующему, теперь уже точному выражению для пройденного пути:
Математики придумали для этого предела, как и для дифференциала, специальный символ. Значок Δ превращается в d, напоминая о том, что интервал времени сколь угодно мал, а
знак суммирования превращается в ∫ - искаженное большое S, первая буква латинского слова «Sumrna». Этот значок назван интегралом. Таким образом, мы пишем
где v(t) — скорость в момент t. Сама же операция суммирования этих членов называется интегрированием. Она противоположна операции дифференцирования в том смысле, что производная этого интеграла равна v(t), так что один оператор (d/dt) «уничтожает» другой (∫). Это дает возможность получать формулы для интегралов путем обращения формул для дифференциалов: интеграл от функции, стоящей в правой колонке табл.8.3, будет равен функции, стоящей в левой колонке. Дифференцируя все виды функций, вы сами можете составить таблицу интегралов.
Любая функция, заданная в аналитическом виде, т. е. выражающаяся через комбинацию известных нам функций, дифференцируется очень просто — вся операция выполняется чисто алгебраически, и в результате мы всегда получаем какую-то известную функцию. Однако интеграл не от всякой функции можно записать в аналитическом виде. Разумеется, для каждого частного интеграла всегда сначала пытаются найти такую функцию, которая, будучи продифференцирована, давала бы функцию, стоящую после знака интеграла (она называется подынтегральной). Однако это не всегда удается сделать. В таких случаях интеграл вычисляют просто суммированием, т. е. вычисляют суммы типа (8.6) со все меньшими и меньшими интервалами, пока не получат результат с достаточной точностью.
- Перевод
Симуляция физики делает небольшие предсказания на основании законов физики. Эти предсказания на самом деле достаточно просты, что-то вроде «если объект вот здесь и он движется с такой скоростью в этом направлении, то за краткий промежуток времени он окажется вот тут». Мы создаём такие предсказания с помощью математической техники под названием интегрирование.
Темой этой статьи как раз и будет реализация такого интегрирования.
Интегрирование уравнений движения
Вы можете помнить из курса старшей школы или вуза, что сила равна произведению массы на ускорение.Преобразуем это уравнение и увидим, что ускорение равно силе, делённой на массу. Это соответствует нашим интуитивным ожиданиям, потому что тяжёлые объекты труднее бросать.
Ускорение - это темп изменения скорости от времени:
Аналогично, скорость - это темп изменения позиции от времени:
Это значит, что если мы знаем текущие позицию и скорость объекта, а также приложенные к нему силы, то сможем проинтегрировать, чтобы найти его позицию и скорость в определённый момент времени.
Численное интегрирование
Если вы не изучали дифференциальные уравнения в вузе, то можете вздохнуть спокойно - вы почти в такой же ситуации, что и те, кто их изучал, потому что мы не будем решать дифференциальные уравнения аналитически. Вместо этого мы будем искать решение численным интегрированием .Вот как работает численное интегрирование: во-первых, начнём с исходной позиции и скорости, затем сделаем небольшой шаг вперёд, чтобы найти скорость и позицию в будущем. Затем повторим это, двигаясь вперёд небольшими шагами, используя результат предыдущих вычислений как исходную точку следующих.
Но как нам найти изменение скорости и позиции на каждом шаге?
Ответ лежит в уравнениях движения .
Давайте назовём наше текущее время t , а шаг времени dt или «delta time».
Теперь мы можем представить уравнения движения в понятном всем виде:
Ускорение = сила / масса
изменение позиции = скорость * dt
изменение скорости = ускорение * dt
Интуитивно это понятно: если вы находитесь в автомобиле, движущемся со скоростью 60 км/ч, то за один час вы проедете 60 км. Аналогично, автомобиль, ускоряющийся на 10 км/ч в секунду, через 10 секунд будет двигаться на 100 км/ч быстрее.
Разумеется, эта логика сохраняется, только когда ускорение и скорость постоянны. Но даже если они меняются, то это для начала вполне неплохая аппроксимация.
Давайте представим это в коде. Начнём с стационарного объекта массой один килограмм и приложим к нему постоянную силу в 10 кН (килоньютонов) и сделаем шаг вперёд, принимая, что один временной шаг равен одной секунде:
Double t = 0.0;
float dt = 1.0f;
float velocity = 0.0f;
float position = 0.0f;
float force = 10.0f;
float mass = 1.0f;
while (t <= 10.0)
{
position = position + velocity * dt;
velocity = velocity + (force / mass) * dt;
t += dt;
}
Вот каким будет результат:
T=0: position = 0 velocity = 0
t=1: position = 0 velocity = 10
t=2: position = 10 velocity = 20
t=3: position = 30 velocity = 30
t=4: position = 60 velocity = 40
t=5: position = 100 velocity = 50
t=6: position = 150 velocity = 60
t=7: position = 210 velocity = 70
t=8: position = 280 velocity = 80
t=9: position = 360 velocity = 90
t=10: position = 450 velocity = 100
Как вы видите, на каждом шаге мы знаем и позицию, и скорость объекта. Это и есть численное интегрирование.
Явный метод Эйлера
Вид интегрирования, который мы только что использовали, называется явным методом Эйлера .Он назван в честь швейцарского математика Леонарда Эйлера , впервые открывшего эту технику.
Интегрирование Эйлера - это простейшая техника численного интегрирования. Она точна на 100% только когда темп изменений в течение шага времени постоянен.
Поскольку в примере выше ускорение постоянно, интегрирование скорости выполняется без ошибок. Однако мы ещё интегрируем и скорость для получения позиции, а скорость увеличивается из-за ускорения. Это значит, что в проинтегрированной позиции возникает ошибка.
Но насколько велика эта ошибка? Давайте выясним!
Существует аналитическое решение движения объекта при постоянном ускорении. Мы можем использовать его, чтобы сравнить численно интегрированную позицию с точным результатом:
S = ut + 0.5at^2
s = 0.0*t + 0.5at^2
s = 0.5(10)(10^2)
s = 0.5(10)(100)
s = 500 метров
Через 10 секунд объект должен был переместиться на 500 метров, но явным метод Эйлера даёт нам результат 450. То есть погрешность в целых 50 метров всего за 10 секунд!
Кажется, что это невероятно плохо, но в играх обычно для шага физики берётся не такой большой временной интервал. На самом деле, физика обычно вычисляется с частотой, примерно равной частоте кадров дисплея.
Если задать шаг dt = 1 ⁄ 100 , то мы получим гораздо лучший результат:
T=9.90: position = 489.552155 velocity = 98.999062
t=9.91: position = 490.542145 velocity = 99.099060
t=9.92: position = 491.533142 velocity = 99.199059
t=9.93: position = 492.525146 velocity = 99.299057
t=9.94: position = 493.518127 velocity = 99.399055
t=9.95: position = 494.512115 velocity = 99.499054
t=9.96: position = 495.507111 velocity = 99.599052
t=9.97: position = 496.503113 velocity = 99.699051
t=9.98: position = 497.500092 velocity = 99.799049
t=9.99: position = 498.498077 velocity = 99.899048
t=10.00: position = 499.497070 velocity = 99.999046
Как вы видите, это достаточно хороший результат, определённо вполне достаточный для игры.
Почему явный метод Эйлера не (всегда) так уж хорош
С достаточно малым шагом времени явный метод Эйлера при постоянном ускорении даёт вполне достойные результаты, но что будет, если ускорение не постоянно?Хорошим примером переменного ускорения является система пружинного амортизатора .
В этой системе масса присоединена к пружине, и её движение гасится чем-то вроде трения. Существует сила, пропорциональная расстоянию до объекта, которая притягивает его к исходной точке, и сила, пропорциональная скорости объекта, но направленная в противоположном направлении, которая замедляет его.
Здесь ускорение в течение шага времени совершенно точно изменяется, но эта постоянно меняющаяся функция является сочетанием позиции и скорости, которые сами постоянно изменяются за шаг времени.
В большинстве коммерческих игровых физических движков используется этот интегратор.
Переход от явного к симплектическому методу Эйлера заключается только в замене:
Position += velocity * dt;
velocity += acceleration * dt;
на:
Velocity += acceleration * dt;
position += velocity * dt;
Использование симплектического интегратора Эйлера при dt
= 1 ⁄ 100 для системы пружинного амортизатора даёт стабильный результат, очень близкий к точному решению:

Даже несмотря на то, что симплектический метод Эйлера имеет ту же степень точности, что и явный метод (степень 1), при интегрировании уравнений движения мы получаем намного лучший результат, потому что оно является симплектическим .
Существует множество других методов интегрирования
И теперь нечто совершенно другое.RK4 - это интегратор четвёртого порядка, то есть накапливаемая ошибка имеет порядок четвёртой производной. Это делает метод очень точным, гораздо более точным, чем явный и неявный методы Эйлера, имеющие только первый порядок.
Но хотя он более точен, нельзя сказать, что RK4 автоматически становится «лучшим» интегратором, или даже что он лучше симплектического метода Эйлера. Всё гораздо сложнее. Тем не менее, это довольно интересный интегратор и его стоит изучить.
Реализация RK4
Существует уже много объяснений математики, используемой в RK4. Например: , и . Я настоятельно рекомендую изучить его выведение и понять, как и почему он работает на математическом уровне. Но я понимаю, что целевая аудитория этой статьи - программисты, а не математики, поэтому мы здесь будем рассматривать только реализацию. Так что давайте приступим.Прежде чем приступить, давайте зададим состояние объекта как struct в C++, чтобы можно было удобно хранить позицию и скорость в одном месте:
Struct State
{
float x; // позиция
float v; // скорость
};
Также нам нужна структура для хранения производных значений состояний:
Struct Derivative
{
float dx; // dx/dt = скорость
float dv; // dv/dt = ускорение
};
Теперь нам нужна функция для вычисления состояния физики из t в t+dt с помощью одного набора производных, а после этого для вычисления производных в новом состоянии:
Derivative evaluate(const State & initial,
double t,
float dt,
const Derivative & d)
{
State state;
state.x = initial.x + d.dx*dt;
state.v = initial.v + d.dv*dt;
Derivative output;
output.dx = state.v;
output.dv = acceleration(state, t+dt);
return output;
}
Функция ускорения управляет всей симуляцией. Давайте используем её в системе пружинного амортизатора и вернём ускорение для единичной массы:
Float acceleration(const State & state, double t)
{
const float k = 15.0f;
const float b = 0.1f;
return -k * state.x - b * state.v;
}
То, что нужно здесь записать, разумеется, зависит от симуляции, но необходимо структурировать симуляцию таким образом, чтобы можно было вычислять ускорение внутри этого метода для заданных состояния и времени, в противном случае он не подойдёт для интегратора RK4.
Наконец, мы получаем саму процедуру интегрирования:
Void integrate(State & state,
double t,
float dt)
{
Derivative a,b,c,d;
a = evaluate(state, t, 0.0f, Derivative());
b = evaluate(state, t, dt*0.5f, a);
c = evaluate(state, t, dt*0.5f, b);
d = evaluate(state, t, dt, c);
float dxdt = 1.0f / 6.0f *
(a.dx + 2.0f * (b.dx + c.dx) + d.dx);
float dvdt = 1.0f / 6.0f *
(a.dv + 2.0f * (b.dv + c.dv) + d.dv);
state.x = state.x + dxdt * dt;
state.v = state.v + dvdt * dt;
}
Интегратор RK4 делает выборку производной в четырёх точках, чтобы определить кривизну. Заметьте, как производная a используется при вычислении b, b используется при вычислении c, и c для d. Эта передача текущей производной в вычисление следующей и даёт интегратору RK4 его точность.
Важно то, что каждая из этих производных a, b, c и d будет разной , когда темп изменения в этих величинах является функцией времени или функцией самого состояния. Например, в нашей системе пружинного амортизатора ускорение является функцией текущей позиции и скорости, которые меняются в шаге времени.
После вычисления четырёх производных наилучшая общая производная вычисляется как взвешенная сумма, полученная из разложения в ряд Тейлора . Эта комбинированная производная используется для перемещения позиции и скорости вперёд во времени, точно так же, как мы делали это в явном интеграторе Эйлера.
Сравнение симплектического метода Эйлера и RK4
Давайте подвергнем проверке интегратор RK4.Очевидно, что поскольку он является интегратором более высокого порядка (четвёртый против первого) он наглядно будет более точен, чем симплектический метод Эйлера, правда?

Неправда . Оба интегратора так близки к точному результату, что при таком масштабе почти невозможно найти между ними разницу. Оба интегратора стабильны и очень хорошо повторяют точное решение при dt = 1 ⁄ 100 .
При увеличении видно, что RK4 действительно более точен, чем симплектический метод Эйлера, но стоит ли эта точность сложности и лишнего времени выполнения RK4? Трудно судить.
Давайте постараемся и посмотрим, сможем ли мы найти значительное различие между двумя интеграторами. К сожалению, мы не сможем долго наблюдать за этой системой, потому что она быстро затухает до нуля, поэтому давайте перейдём к простому гармоническому осциллятору , который колеблется бесконечно и без затуханий.
Вот точный результат, к которому мы будем стремиться:

Чтобы усложнить интеграторам задачу, давайте увеличим шаг времени до 0,1 секунды.
Теперь запустим интеграторы на 90 секунд и увеличим масштаб:

Через 90 секунд симплектический метод Эйлера (оранжевая кривая) сдвинулся по фазе относительно точного решения, потому что его частота немного отличалась, в то время как зелёная кривая RK4 соответствует частоте, но теряет энергию!
Мы чётко можем это заметить, увеличив шаг времени до 0,25 секунды.
RK4 сохраняет верную частоту, но теряет энергию:

А симплектический метод Эйлера в среднем намного лучше сохраняет энергию:

Но от сдвигается от фазы. Какой интересный результат! Как вы видите, если RK4 имеет более высокий порядок точности, то он не обязательно «лучше». В этом вопросе есть множество нюансов.
Заключение
Мы реализовали три различных интегратора и сравнили результаты.- Явный метод Эйлера
- Симплектический метод Эйлера
- Метод Рунге-Кутты порядка 4 (RK4)
Если вам действительно нужна бОльшая точность, чем у симплектического метода Эйлера, я рекомендую посмотреть на симплектические интеграторы более высокого порядка, рассчитанные на
Кратко остановимся на понятиях гамильтоновой механики, которые нам будут необходимы при изучении динамики движения частиц . Однако большая часть длинных доказательств не приводится. Если материал окажется для читателя незнакомым, советуем обращаться к Голдстейну. С помощью координатных преобразований можно получить различные эквивалентные формы уравнений движения. Одну из таких форм можно получить, вводя функцию Лагранжа
где пробегают все степени свободы; кинетическая энергия; потенциальная энергия; считаем, что связи не зависят от
времени. Уравнения движения в лагранжевой форме для каждой координаты имеют следующий вид:
![]()
где Q - силы, не вытекающие из потенциала (силы трения). Уравнения (1.20) могут быть также выведены из вариационного принципа или непосредственным сравнением с ньютоновскими законами движения. Если мы определим гамильтониан через
не определяя пока продифференцируем то получим

где выражение (1.20) подставлено в третью сумму с правой стороны. Если затем определить посредством выражения
![]()
то первая сумма с правой стороны тождественно обратится в нуль, и, приравняв коэффициенты при одинаковых дифференциалах, получим форму уравнений движения, содержащую только первые производные:

Здесь обобщенный импульс, который для случая, обсуждавшегося ранее, сводится к обычному импульсу. В последующих параграфах мы будем предполагать, что все силы имеют потенциал; в этом случае и (1.24) сводится к (1.1) - каноническим уравнениям Гамильтона.
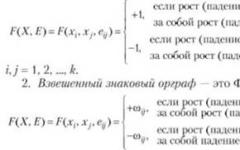
В ситуациях, где не могут быть полностью решены уравнения движения, можно получить значительную информацию относительно движения частиц, если есть возможность найти интегралы движения. Ранее качественно показано, каких упрощений можно добиться при существовании таких интегралов. Выведем некоторые свойства констант движений для гамильтоновых систем. Записывая
полную производную по времени от произвольной функции и подставляя уравнения Гамильтона (1.1), получаем
Если не зависит явно от времени и коммутирует с гамильтонианом, то член в круглых скобках исчезает, и -интеграл движения. Ясно, что если гамильтониан не является явной функцией времени, то он - интеграл движения. Если мы в качестве функции возьмем одну из компонент импульса (предполагается, что она неявная функция времени), а соответствующая координата - циклическая в гамильтониане (т. е. из (1.20) или непосредственно из уравнений Гамильтона получаем, что таким образом, интеграл движения:
Для гамильтониана, независящего явно от времени, и для специального случая, когда все координаты циклические,
![]()
Интегрируя, получаем соотношение
![]()
которое дает решение для временной зависимости переменных. Если можно найти такое преобразование, которое переводит все импульсы в константы, то выражения (1.26) - решения в преобразованной системе координат. Тогда обратное преобразование дает полное решение, записанное в первоначальных координатах.
Мы уже нашли преобразование от лагранжевой формы с переменными к гамильтоновым пер еменным Более общее преобразование ведет к теории Гамильтона - Якоби классической механики. Для перехода от переменных к новой группе переменных их можно связать посредством функции, зависящей от одной старой и одной новой переменных. Так как лагранжиан выводится из вариационного принципа, то, используя (1.21), имеем

запись можно сделать либо для координат с черточкой, либо для координат без черточки. Таким обр азом, подынтегральное выражение (1.27) для двух групп координат отличается самое большее на полный дифференциал некоторой функции, что можно выразить следующим образом:
![]()
где мы произвольно предположили, что функция Расписывая полную производную от получаем
Считая, что переменные в (1.29) независимы, находим, сравнивая члены в (1.28) и требуя, чтобы члены при равнялись нулю, что

![]()
Можно также определить произвольные функции как функции других пар переменных:
Если, к примеру, образуем преобразованием Лежандра
то получим уравнения преобразования:

Функции определяются преобразованиями, сходными с (1.31), которые ведут к соответствующим уравнениям преобразования.
С помощью этих преобразований можно показать, хотя бы формально, как могут быть решены уравнения движения динамической системы. Заслуживают интереса два случая: один - с зависящим от времени гамильтонианом, другой - с гамильтонианом, не зависящим от времени. В первом случае положим что эквивалентно преобразованию к новым координатам и импульсам, производные по времени от которых, как следует из канонических уравнений движения, равны нулю. Таким образом, координаты и импульсы сами являются константами, что можно конкретизировать как начальные значения непреобразойанных величин. Таким образом, уравнения преобразования являются в действительности
нием, дающим координату и импульс в любой момент времени в зависимости от начальных значений. Подставляя (1.32) в (1.34) с получаем дифференциальное уравнение в частных производных.